
Capstone Design Project

Undergraduate Thesis
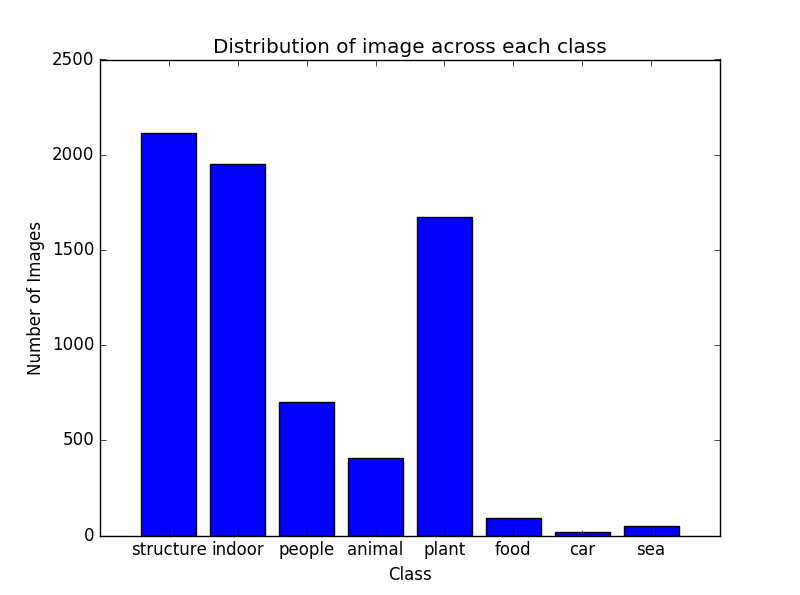
Image Classification Competition

Engineering Design Project
-
Capstone Design Project
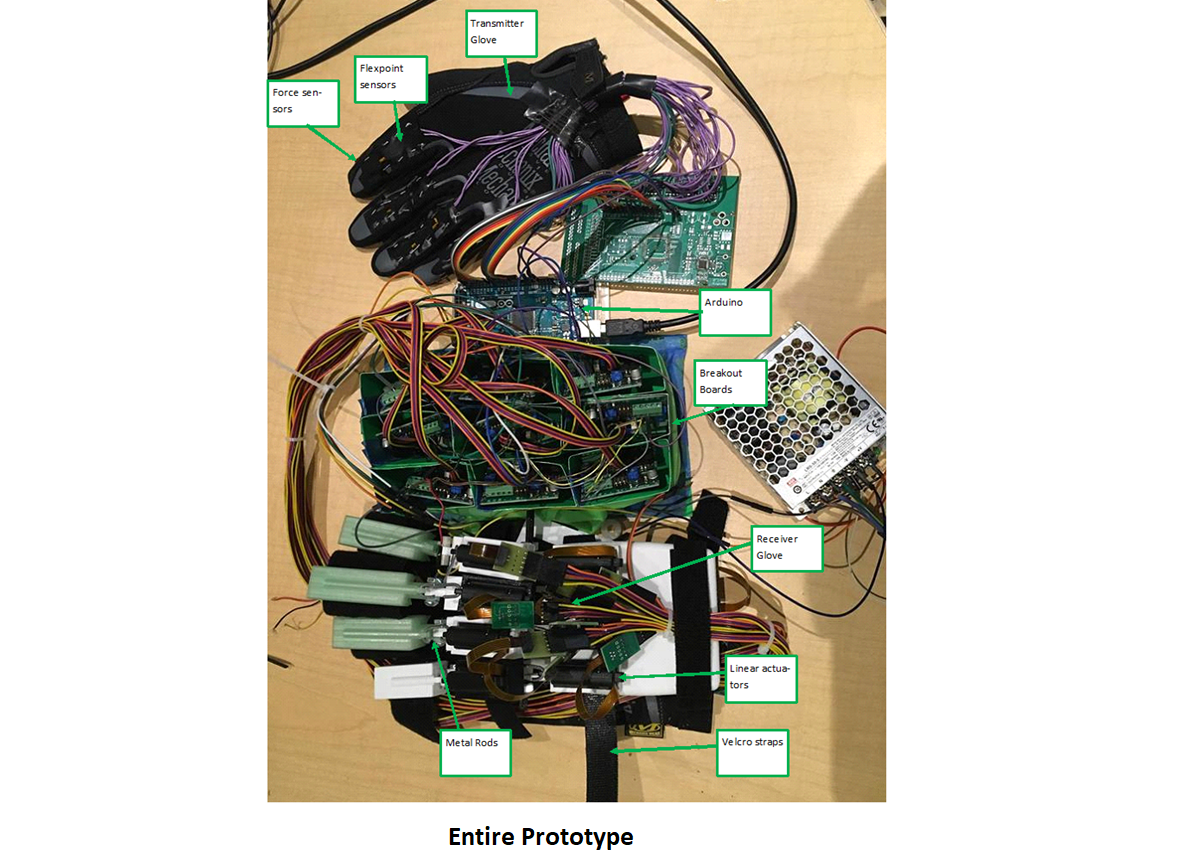
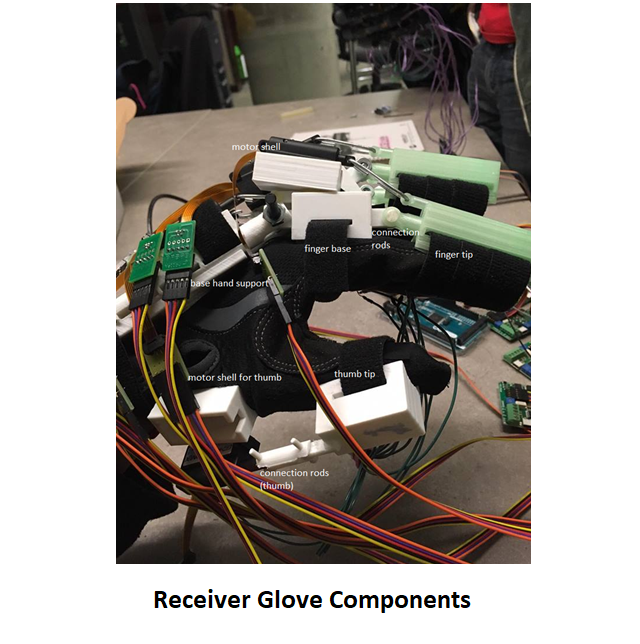
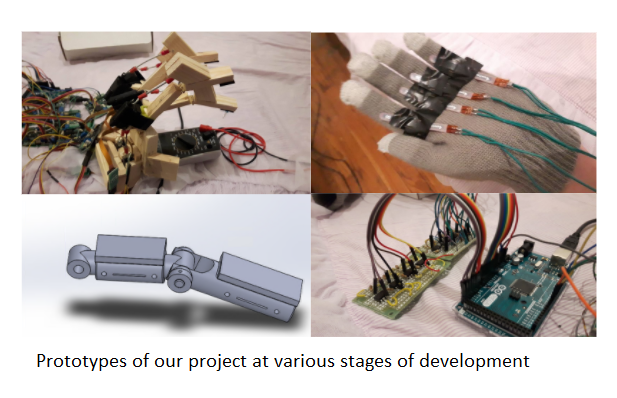
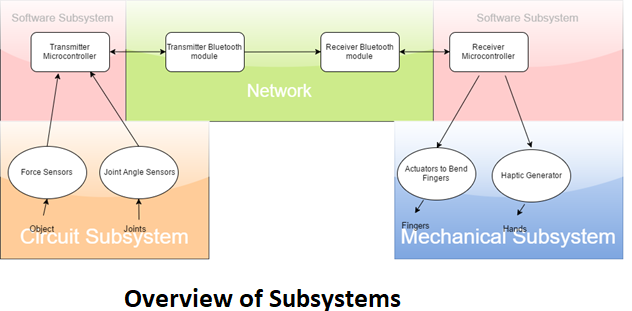
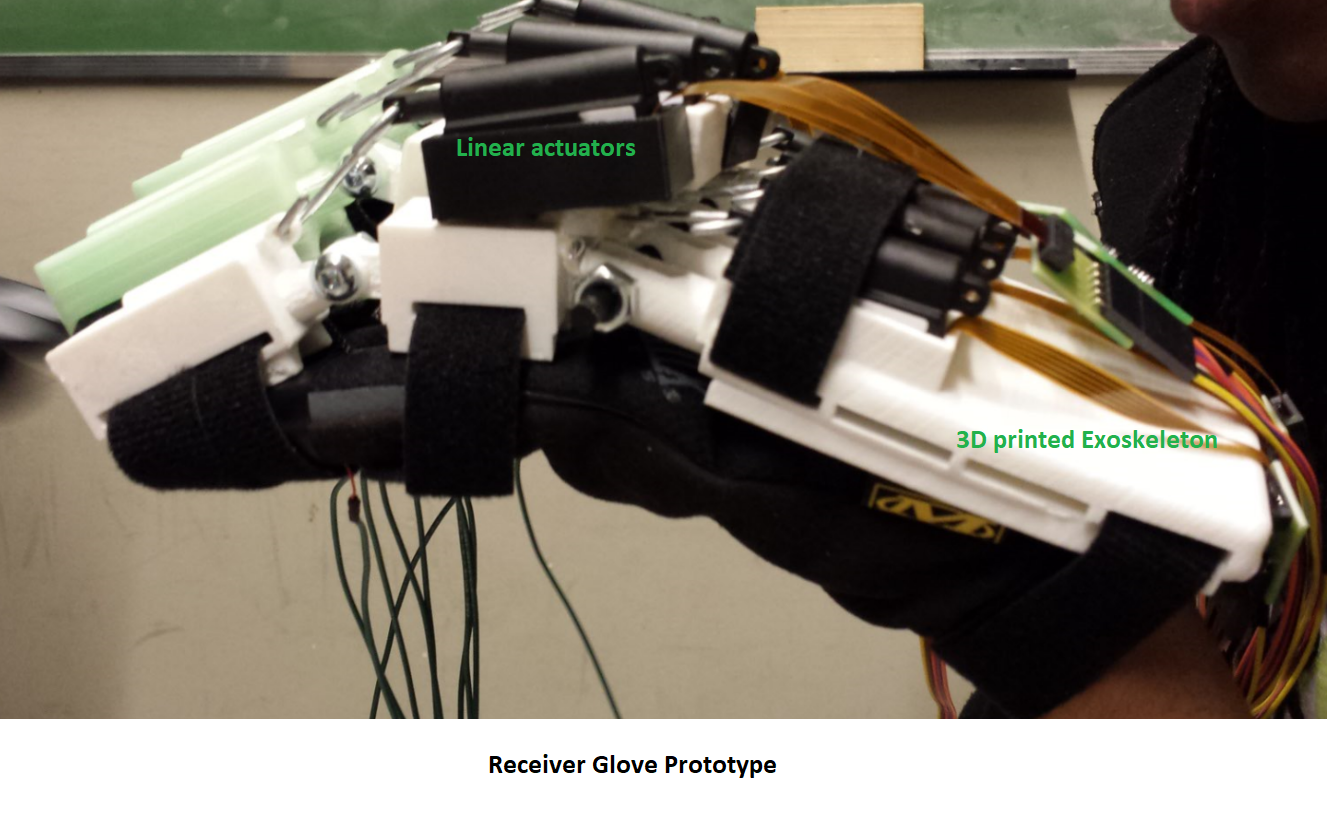
For the Electrical and Computer Engineering Capstone project, I worked in a team to design and produce a prototype for a new product that could fit the needs of the market. Our product is called SenAre and it is a pair of haptic gloves aimed to enhance people’s experience during communication and interaction. Using a pair of gloves for two people, one glove worn by each person, the sense of touch of one glove (transmitter glove) is replicated to the other glove (receiver glove). This will enable inter-communication between users by allowing them to transfer haptic cues. I mainly worked on the software of the gloves as well as worked with the team for integration of all the components. We produced many intermediate prototypes to test our ideas in order to know that our glove is able to control finger joint orientation and replicate tactile sensation. Our business pitch for SenAre won second place at the Orbis Den, which is a competition between capstone groups to present the business aspects of the project as well as give a technical overview of the design. -
-
Undergraduate Thesis
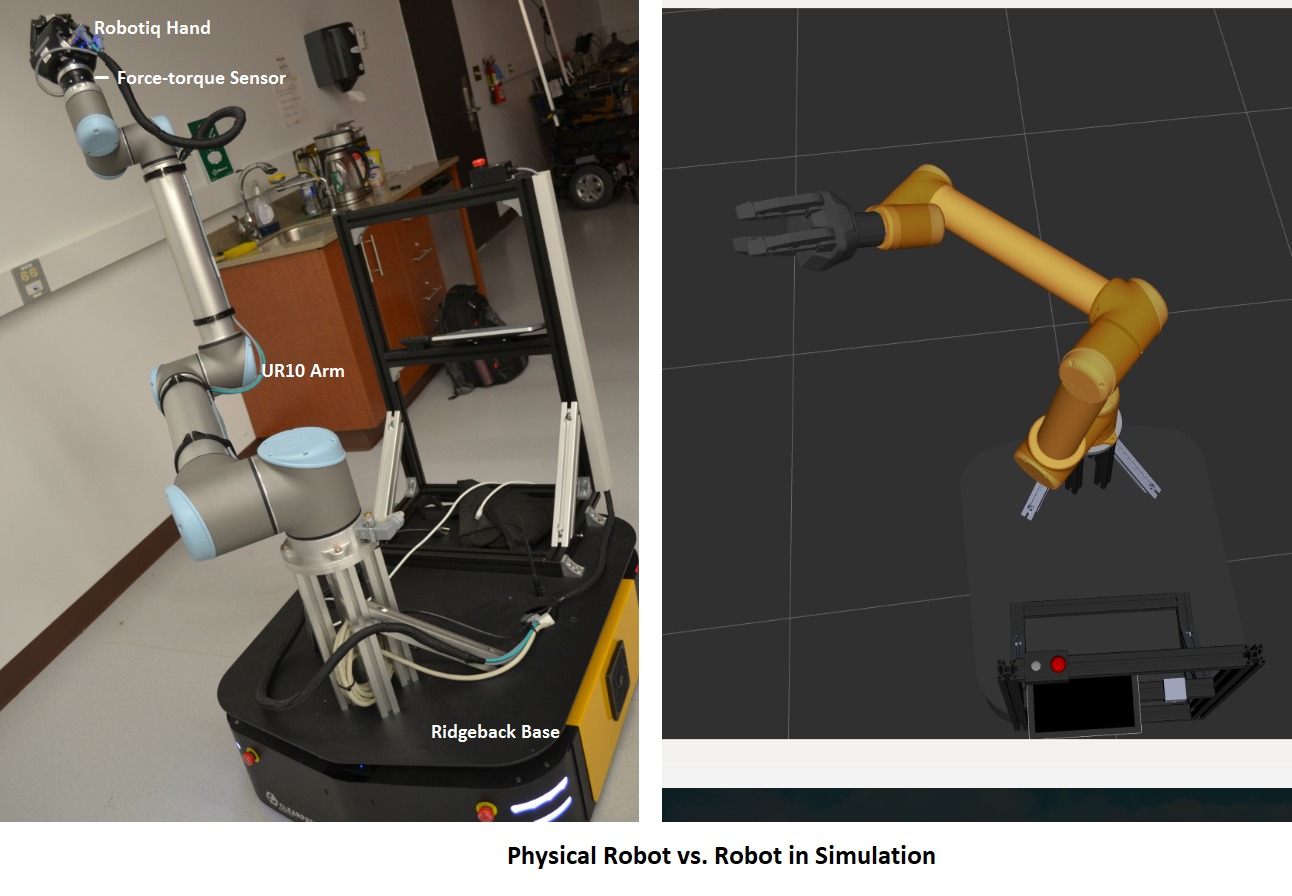
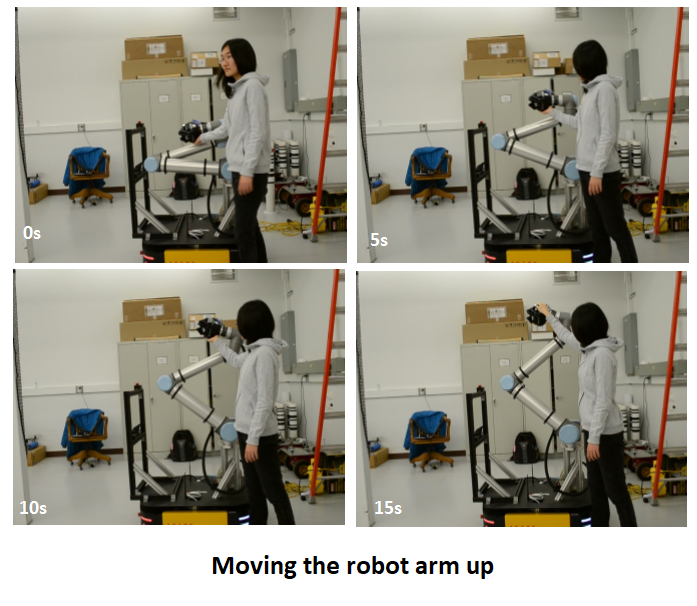
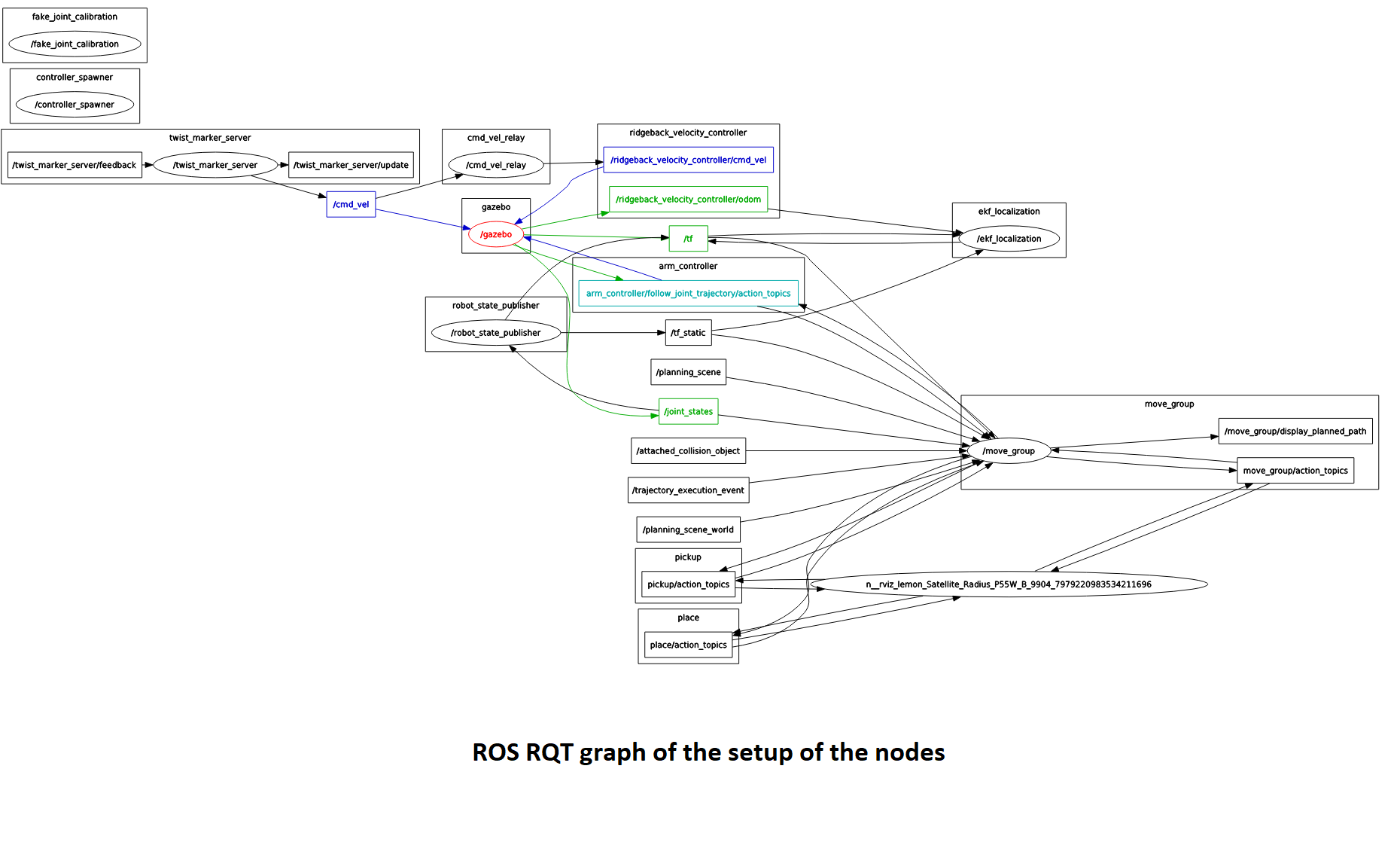
My undergraduate thesis is supervised by Professor Jonathan Kelly of the University of Toronto Institute for Aerospace Studies (UTIAS). The project is on the direct physical control of a mobile manipulator. This would allow users to be able to move the robot base and arm by force and torque input on a sensor on the robot hand. The robot I worked with is called the Thing, formed by attaching a UR10 robot arm with a robotiq hand onto a Ridgeback base. Since the robot has redundant degrees of freedom, I set the response of base or arm movement to force and torque inputs by setting different thresholds for motion of each component. The motion of the arm is determined through variable impedance control, where the impedance of the robot motion is adjusted by the time derivative of force. Before testing on the physical robot, I first set up the system in simulation with the lab so we can verify its safety. The final report for my undergraduate thesis is available upon request. -
-
Image Classification Competition
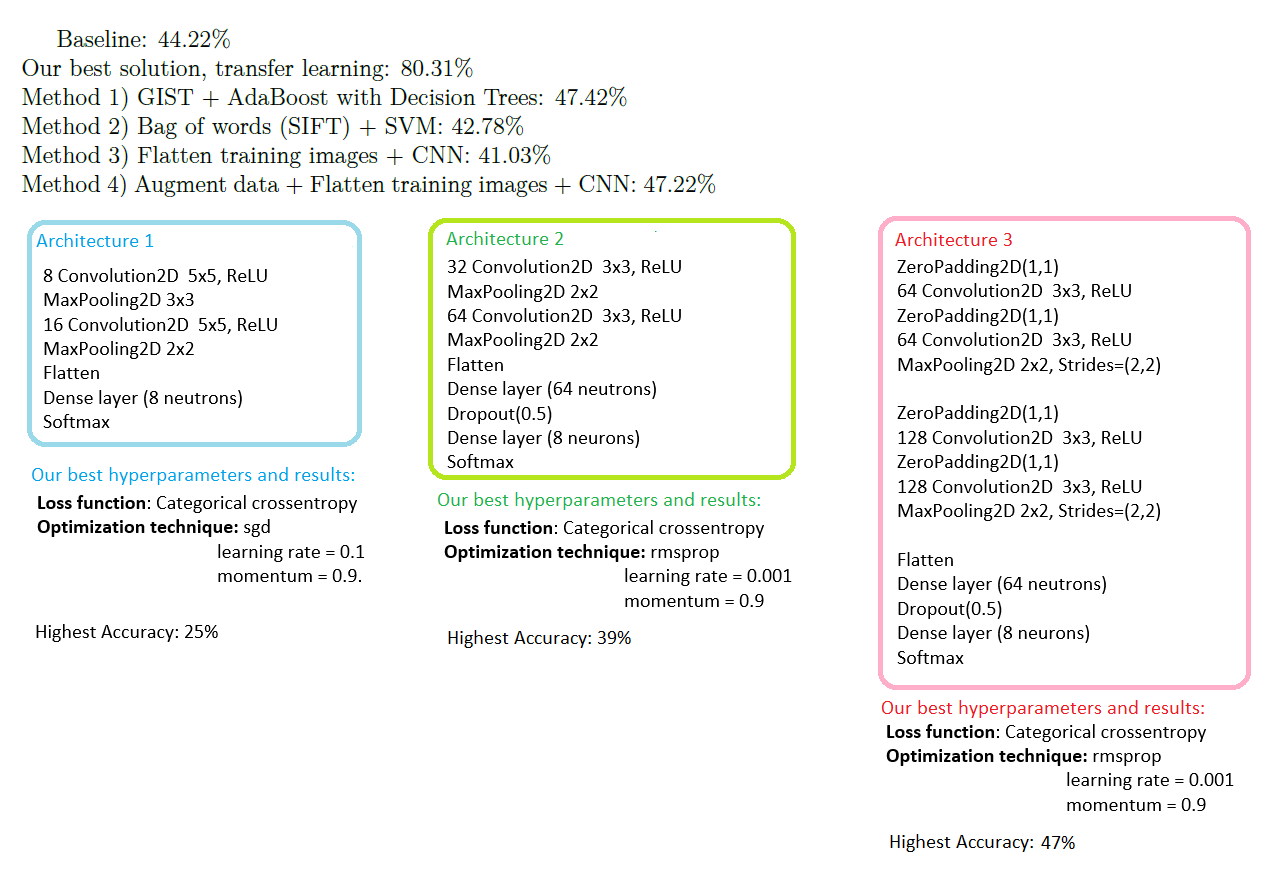
For this project, I worked with a partner to classify a set of images for the final competition of a machine learning class. The image category and distribution are shown in the first image and we can see that the data set is very unbalanced. As a result, the CNNs architectures we tried had trouble classifying the rare classes and we used techniques such as assigning class weights, augmenting the data set and under-sampling common classes to address this issue. We also chose to use the area under an ROC curve for model selection since with an imbalanced training set, models can be representative but not discriminative. Our best solution takes advantage of larger networks trained on more data using transfer learning. We used weights from the last hidden layer of Inception v3, a network pre-trained on ImageNet, as a feature extractor to classify the images. Our final result placed 19/176 in the competition and the final report is available upon request. -
-
Engineering Design Project
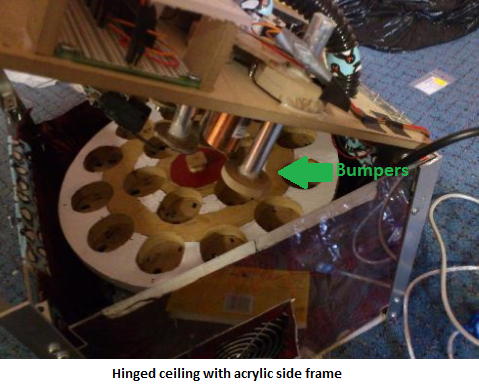
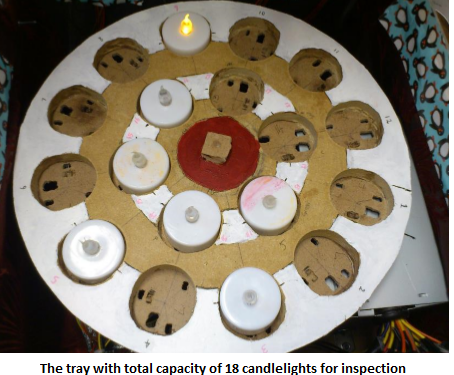
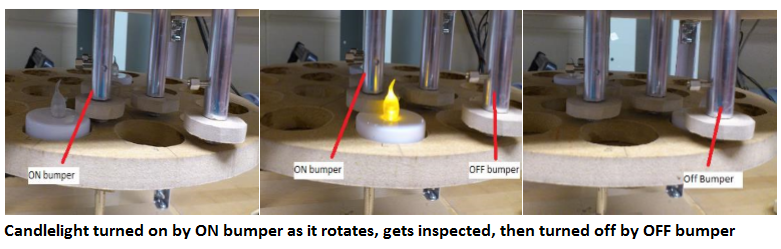
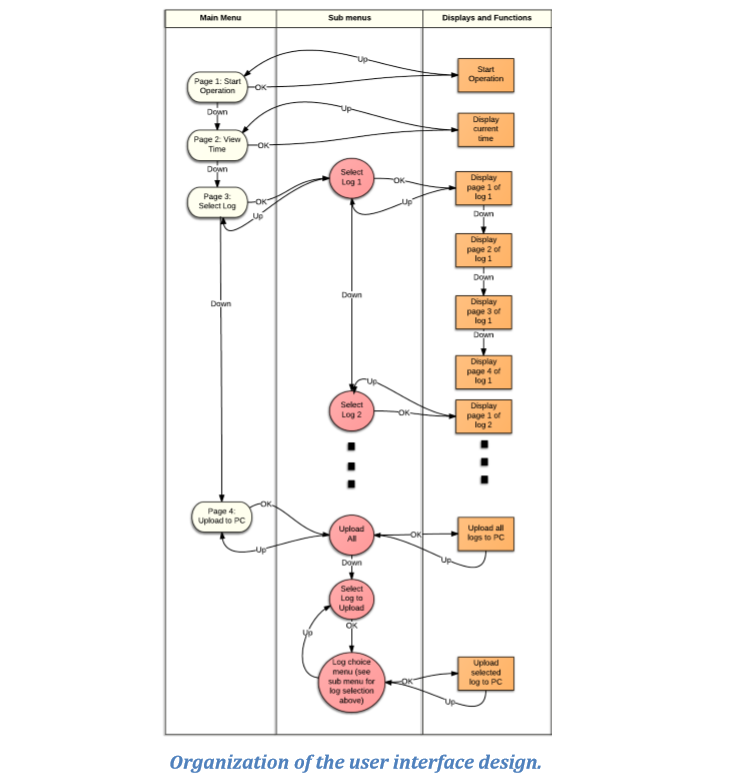
For this project, I worked in a group of three to design and build a prototype for quality control of LED candlelights. The candlelight is expected to flicker and the machine autonomously sorts each light into working (flickering), not flickering and does not turn on. The final prototype must allow for efficient loading and unloading of the lights and must be able to turn each light on and off autonomously during operation. I worked on the software aspect of this project and my program controlled machine operations and interacted with users through the number pad shown in the first picture. The implementation was in PIC16 Assembly. The program controlled the actuator to test each light and classified lights using light sensor data. The user interface allowed accessing past test history and supported downloading test data onto the PC. I received the Shaw Design scholarship for my work in this second year design project. -
- The Multi-Agent Behavior Dataset: Mouse Dyadic Social Interactions, NeurIPS 2021 Datasets & Benchmarks
Jennifer J. Sun, Tomomi Karigo, Dipam Chakraborty, Sharada P. Mohanty, Benjamin Wild, Quan Sun, Chen Chen, David J. Anderson, Pietro Perona, Yisong Yue, Ann Kennedy
[paper][dataset][code][challenge] - The Mouse Action Recognition System (MARS), eLife
Cristina Segalin, Jalani Williams, Tomomi Karigo, May Hui, Moriel Zelikowsky, Jennifer J. Sun, Pietro Perona, David J. Anderson, Ann Kennedy
[paper][project website][code]